PI校正环节在经典控制论中非常有用,特别是对负反馈控制系统,基本上都有PI校正环节。
1.下面分别说明比例环节和积分环节的作用,以阶跃信号为例。
①比例环节单独作用


以上分析说明,若只有比例环节的控制系统,阶跃响应也是一个阶跃信号,但会存在一定静差,且静差值随Kp增大而减小,但始终存在,不随时间变化。
输出的理论波形跟实际的数字控制输出波形会不一致。因为实际数字控制系统每隔一个计算周期运算一次,而在这个计算周期中,输出量只受上一次的调节参数和中间变量的控制。所以可能会出现超调情况。
②比例-积分共同作用


拉氏反变换

以上分析说明,当加入积分项后,阶跃响应为一逐渐上升的曲线,且误差分量随时间逐渐趋于零;KI越大,误差分量衰减越快,KP越大,误差分量衰减越慢。
PI校正环节的优缺点:
比例系数Kp增大,则会减小稳态误差,减小了上升时间,提高了响应速度,但会引入并逐渐增大超调量,直至系统振荡;
积分环节提高了系统型别,消除稳态误差,但参数KI若过大,积分作用太强,会在大偏差阶段引起过大超调,调节时间变长,最后振荡。
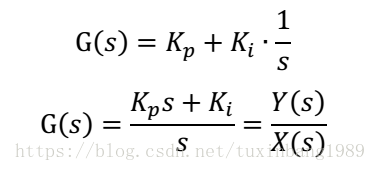
2.PI环节的表达式
传递函数
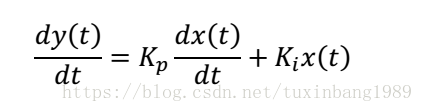
微分方程
对应的离散方程为

写成序列形式

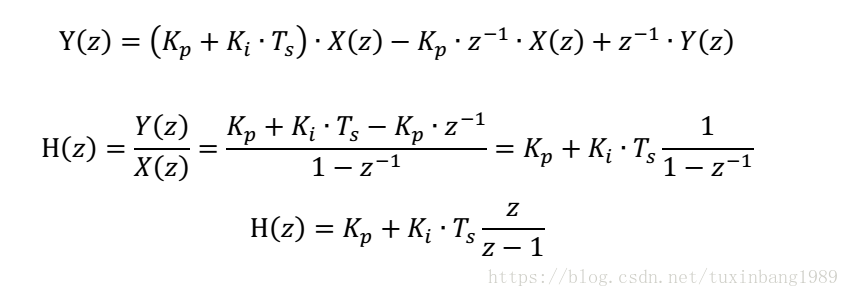
写出相应的 z 变换系统方程
根据序列形式,可以写出程序代码:
#define Ts 0.00001 // 采样时间typedef struct PI_Ele{ float kp; // 比例环节系数 float ki; // 积分环节系数 float x1; float x2; float yout; float y1;} PI_Vector; #define PI_Macro(PI_Vector v) \ // 算法的宏定义 v.yout = (v.kp+v.ki*Ts)*v.x2-v.kp*x1+v.y1; \ v.x1 = v.x2; \ v.y1 = v.yout;